以下是視頻文字稿:
 SLAM 的中文名叫“同時定位與地圖構建”,是幫助機器在進入一個陌生環境時,通過移動和觀察快速了解周圍環境,並繪製出環境地圖的技術。
SLAM 的中文名叫“同時定位與地圖構建”,是幫助機器在進入一個陌生環境時,通過移動和觀察快速了解周圍環境,並繪製出環境地圖的技術。
從名字也能看出,SLAM 包含兩項核心任務:了解自己在哪兒,即定位 ;描繪自己所在的空間,即地圖構建 。
這兩個任務需要機器對環境有三維感知,因此深度信息相當重要。 為機器充當眼睛的一般是激光雷達、單目/雙目相機或是 RGB-D 深度相機。
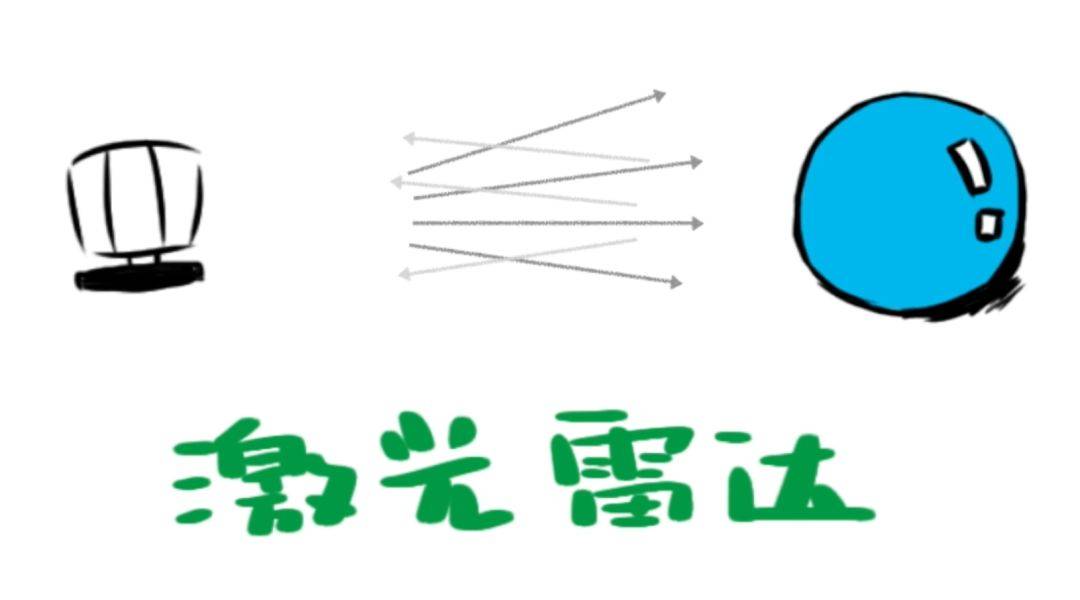
激光雷達通過發射和接受反射回來的激光束,獲得距離、速度等信息;
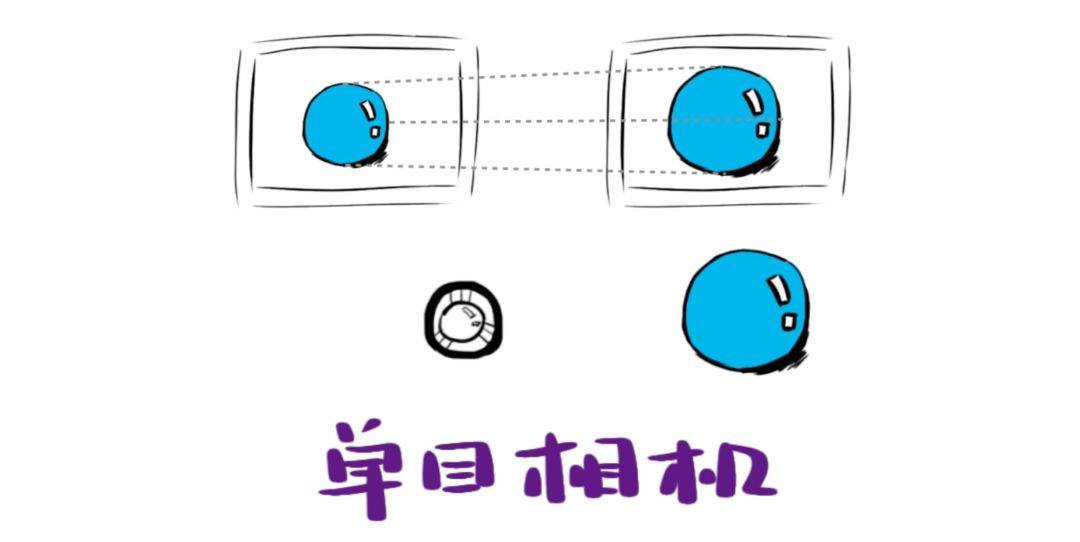
單目攝像頭需要對比機器在移動過程中拍攝到的圖像變化,來判斷與物體之間的距離;
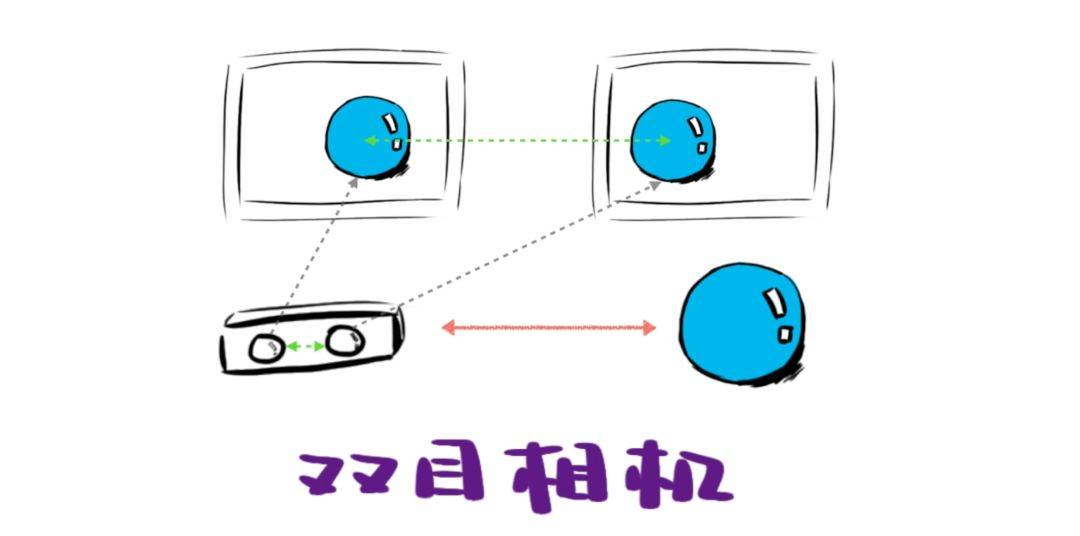
雙目攝像頭更像人眼,可以通過兩隻眼睛看到圖像的不同,直接獲取深度信息;
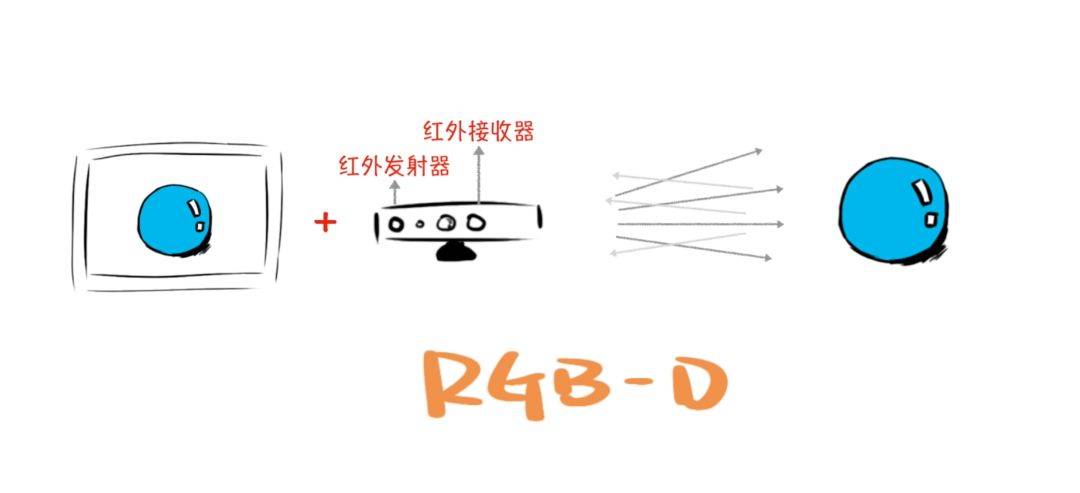
RGB-D 由於配備了紅外發射器和接收器,利用結構光就能直接獲得周圍環境的深度信息,我們也將它稱為深度相機。
不了解結構光的同學,可以回到上一期 Face ID 識別原理部分複習一下。

有了周圍環境的圖像和深度信息,機器就能一邊移動一邊將這些圖像拼接起來,繪製出環境地圖,以便更好的移動或是完成更複雜的任務。
如果只有這麼簡單,人們為什麼會在這個課題上花費超過三十年時間?
*文章為作者獨立觀點,不代表虎嗅網立場
本文由 KnowingAI知智 授權 虎嗅網 發表,並經虎嗅網編輯。 轉載此文章須經作者同意,並請附上出處( 虎嗅網 )及本頁鏈接。 原文鏈接:https://www.huxiu.com/article/251621.html
本文由 KnowingAI知智 授權 虎嗅網 發表,並經虎嗅網編輯。 轉載此文章須經作者同意,並請附上出處( 虎嗅網 )及本頁鏈接。 原文鏈接:https://www.huxiu.com/article/251621.html
未來面前,你我還都是孩子,還不去下載 虎嗅App 猛嗅創新!